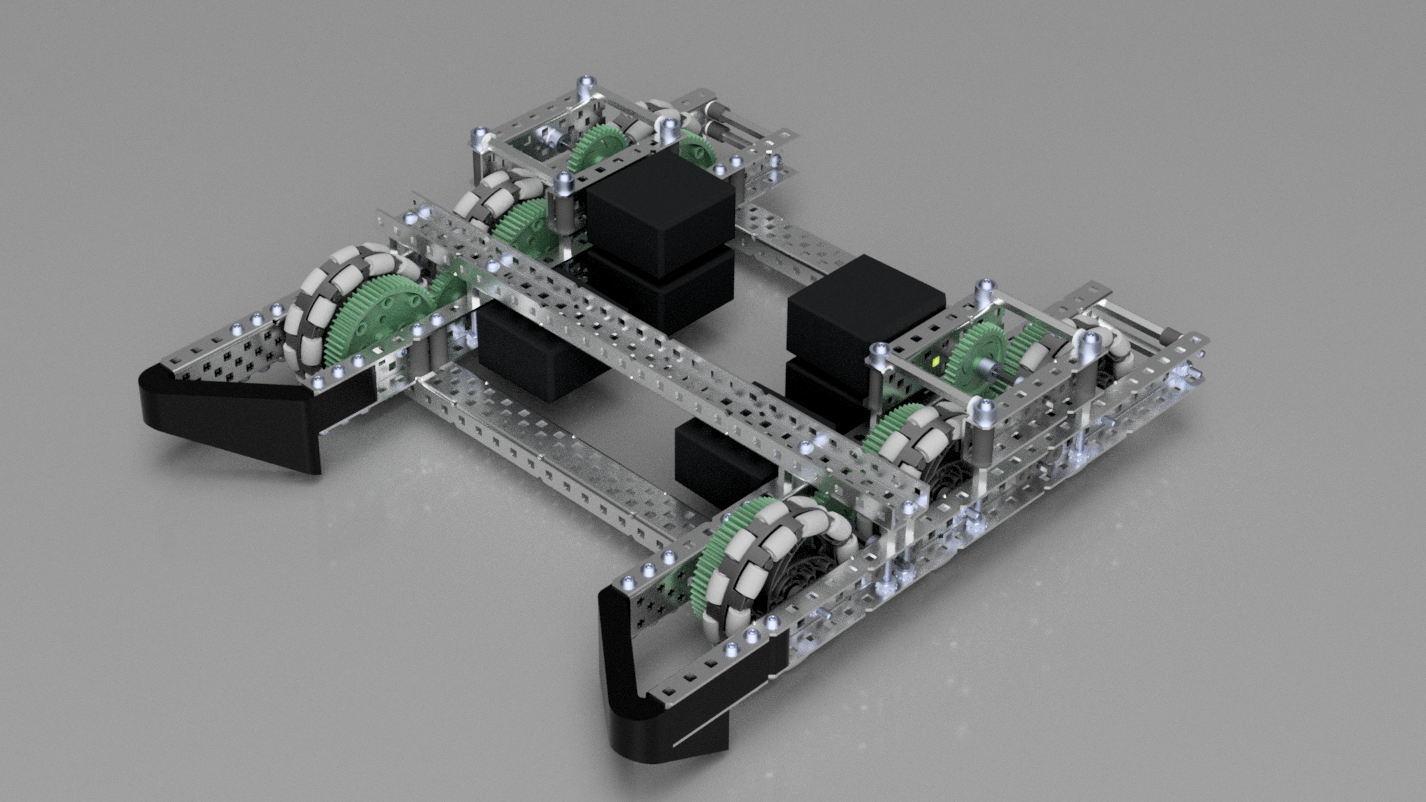
We designed two robots to compete as a team. This is the smaller of the two. This season's game was designed around picking up game balls and dispensing them into various goals of differing heights. This challenged us to design a versatile intake, storage, and dispensing mechanism that could adapt to dispensing balls in low, medium, and high goals. This robot had a size limitation 15"x15"x15". My main contribution was designing the drivetrain in Fusion 360 for this robot.
Project attributes
- Date started
- Sep 8, 2025
- Development time
- 15 weeks
- Categories
- Robotics
- Technologies
- VEX V5 VS Code Python C++
Media
Project gallery