Mechanical Control Systems
Develop mechanical control systems by implementing transducers, actuators, feedback, vision and sensing systems, and other mechanical systems into robotic platforms.
Projects demonstrating this objective
15 weeks
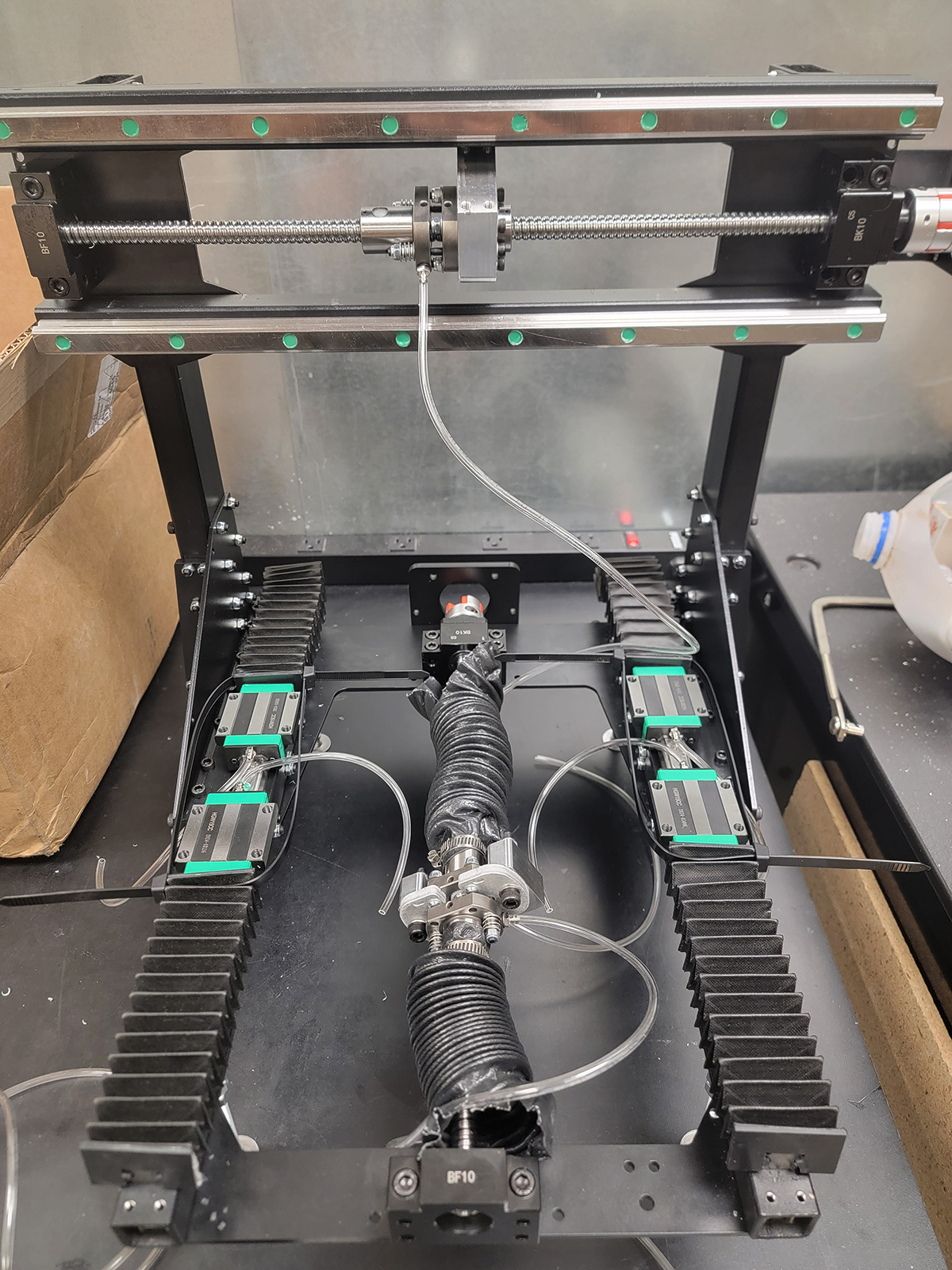
Building a CNC Machine
I wanted the ability to create aluminum parts from my designs. 3D printing is cool and is a wonderful tool, but some things can't be made ou...
15 weeks
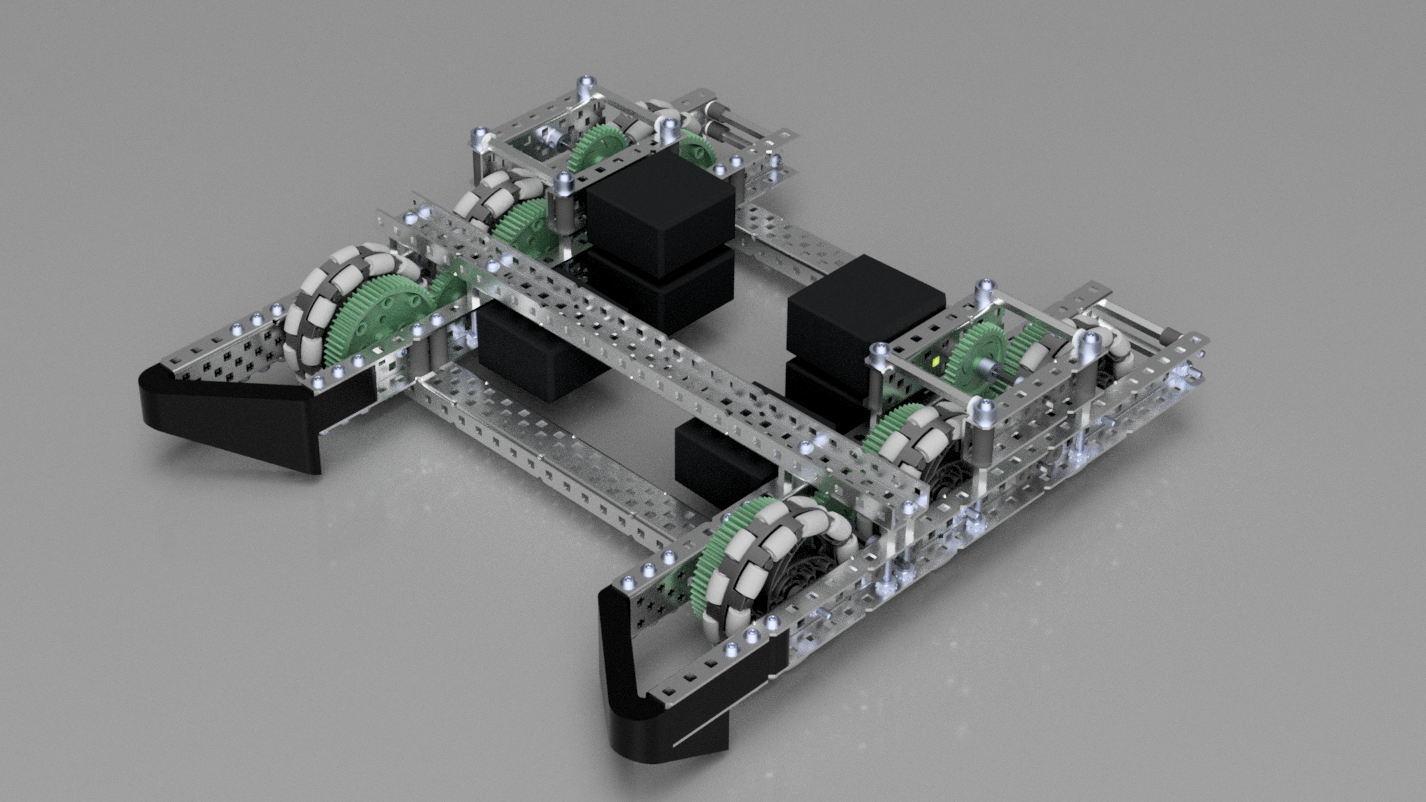
VEXU Push Back Small Robot
We designed two robots to compete as a team. This is the smaller of the two. This season's game was designed around picking up game balls an...
15 weeks
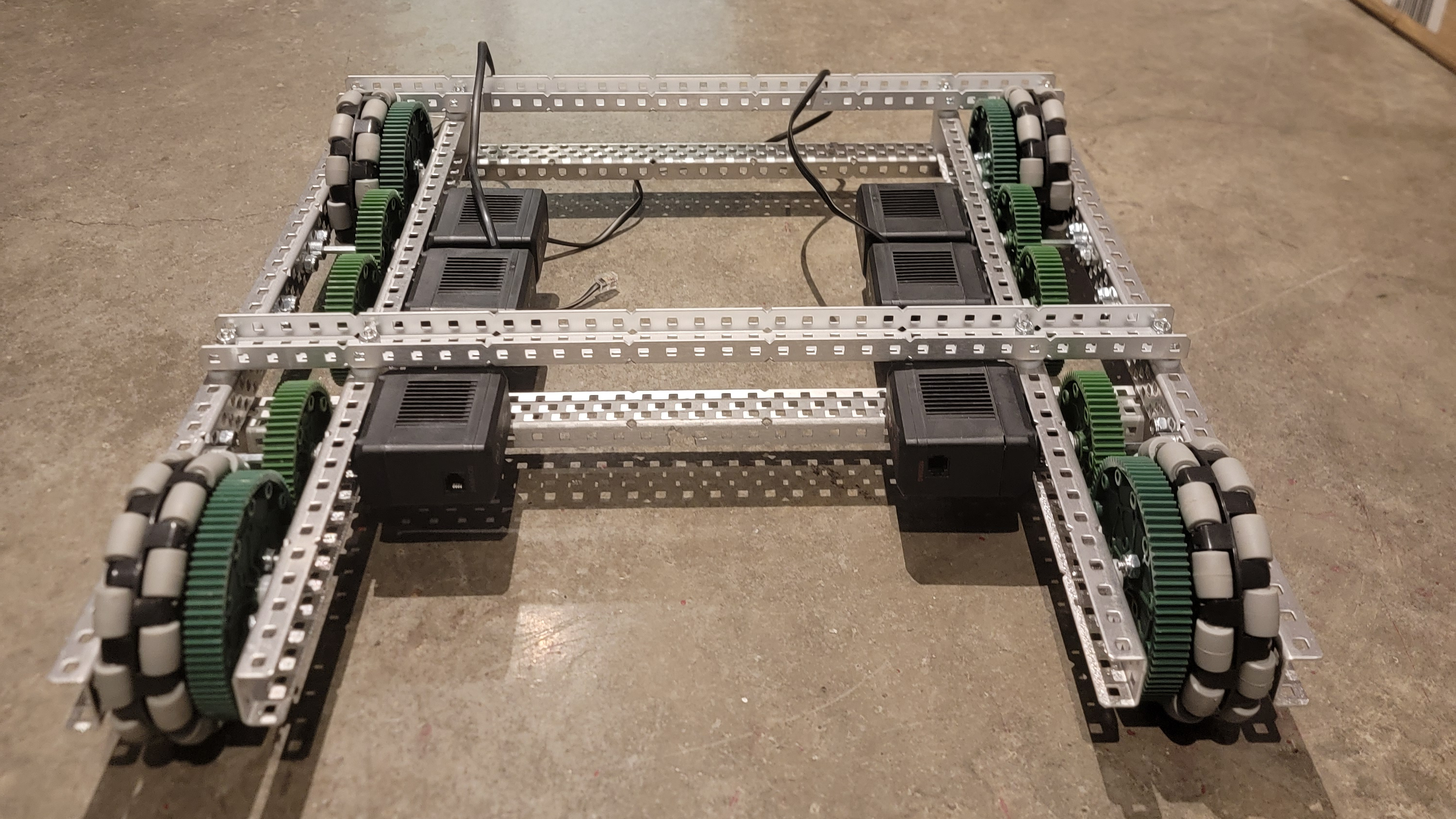
VEXU Push Back Large Robot
We designed two robots to compete as a team. This is the larger of the two. This season's game was designed around picking up game balls and...
15 weeks
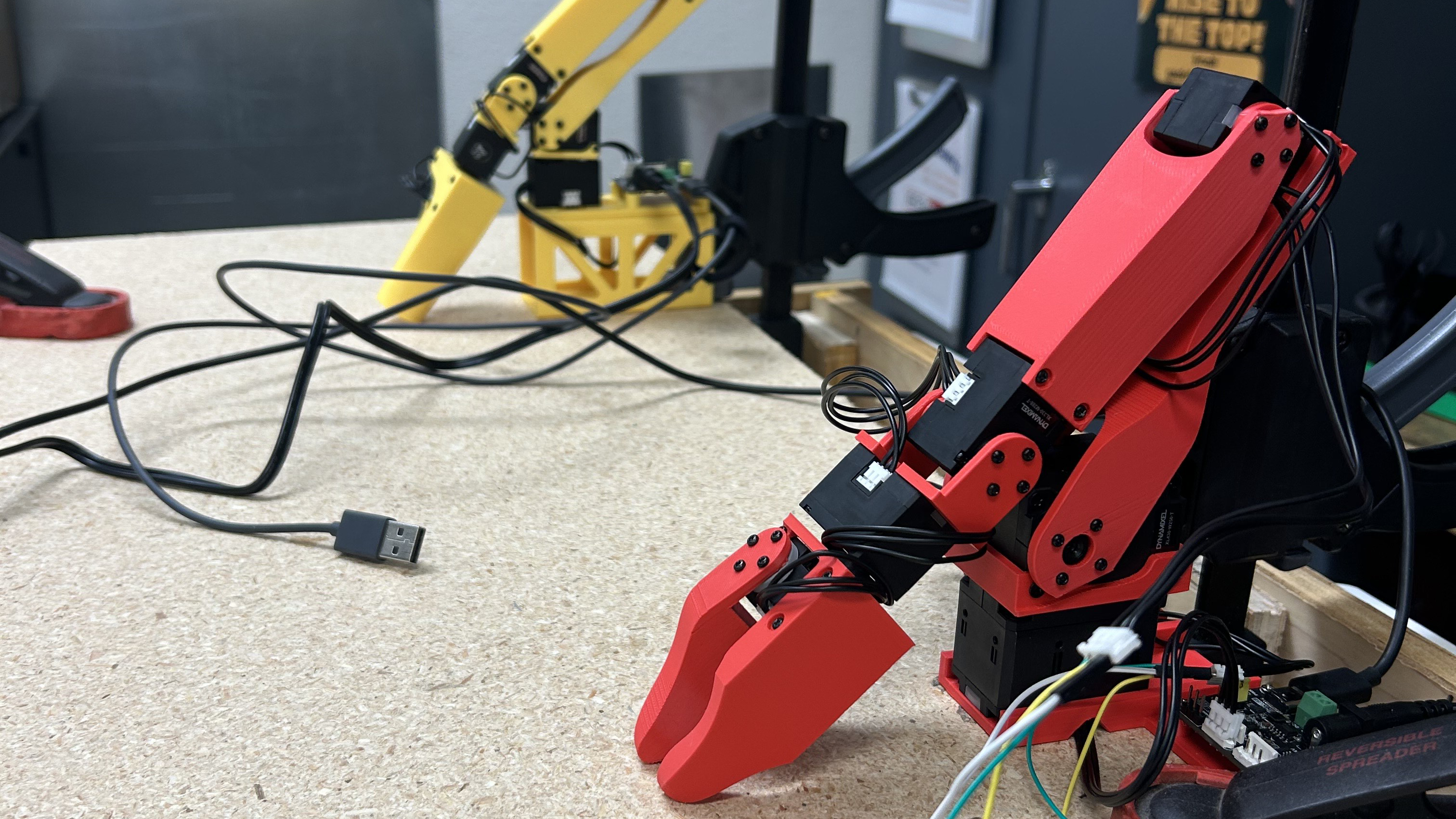
Robotic Arms
The robotic arms project was inspired by a conversation between a fellow classmate named Alexa and I when we talked about creating a project...
2 weeks
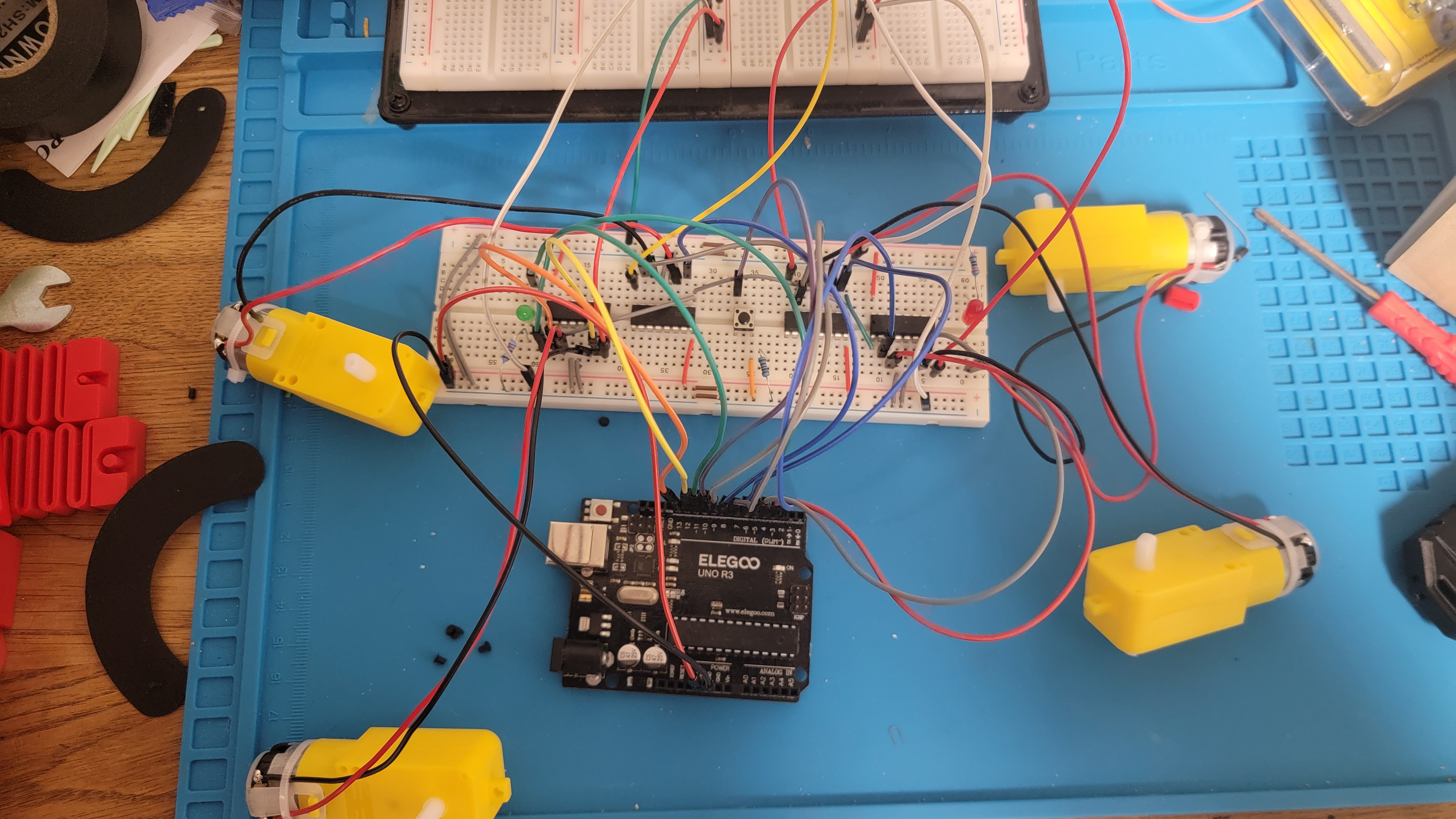
Arduino Uno Skeleton RC Car
This project was used as a final for my RBT211 class. I set out to make use of the new L293D motor drivers that we were learning about to ma...
5 weeks
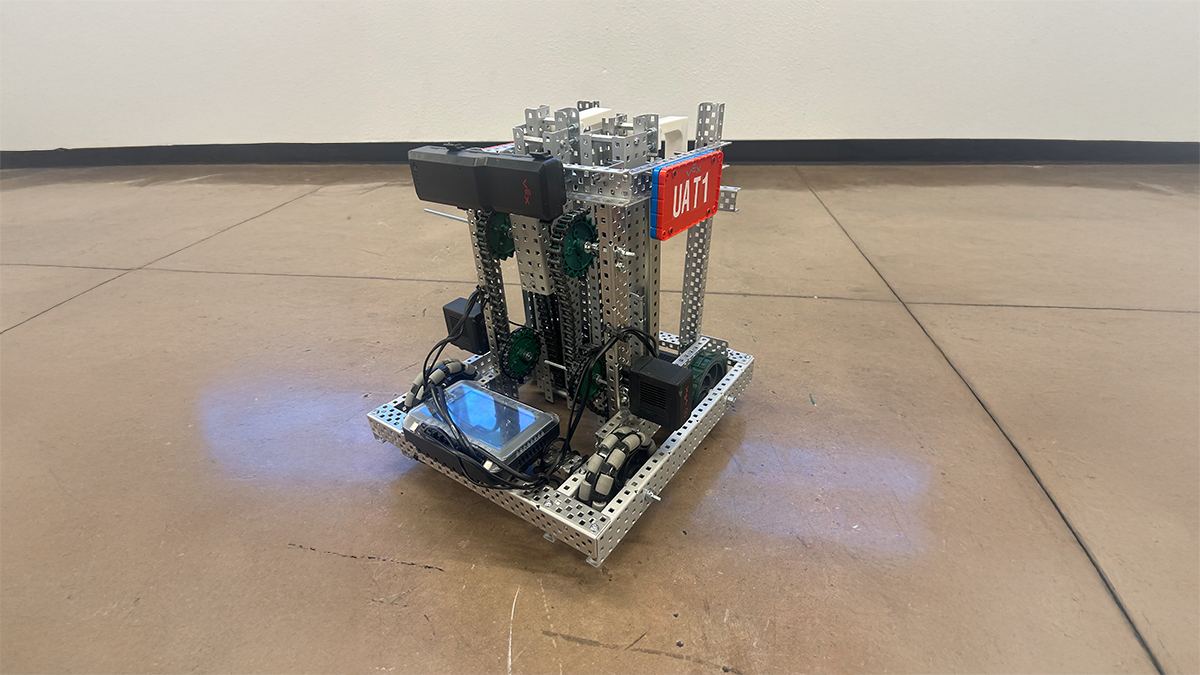
VEXU High Stakes Climb Robot
This robot utilized a cascade lift to hoist itself onto the field goal at the end of the competition. Robots were awarded points if they co...
5 weeks
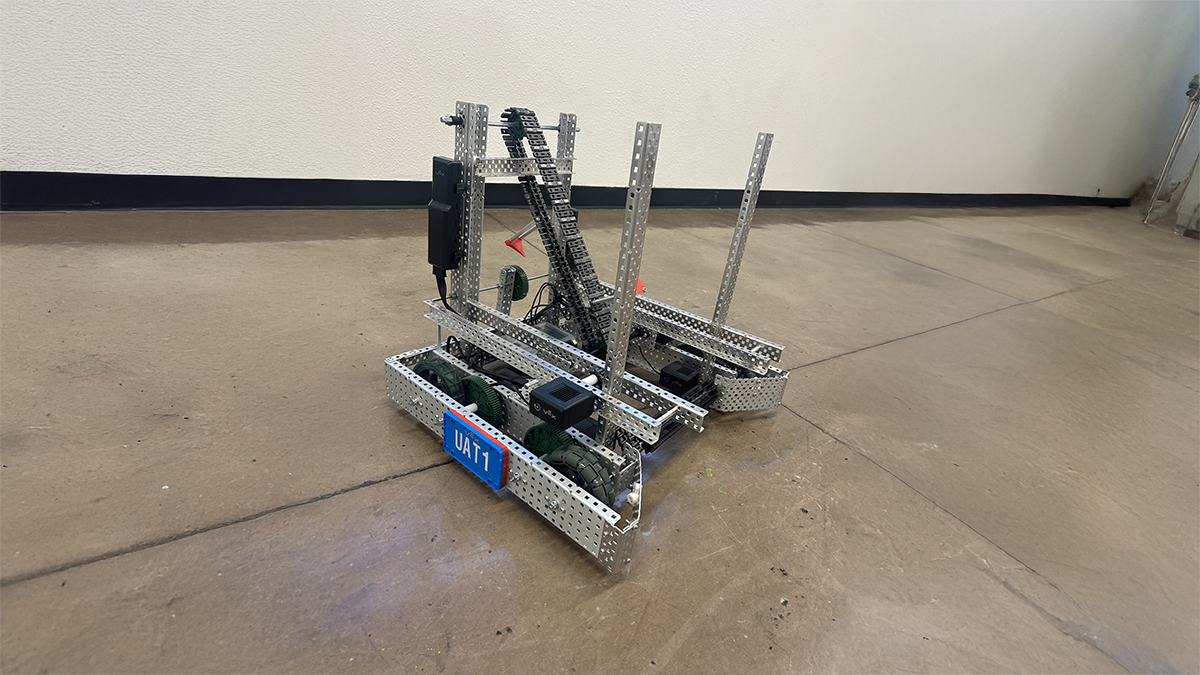
VEXU High Stakes Ring Robot
The robot we built was designed to pick up game rings and accurately place them on goal posts. Our team engineered a reliable ring-intake an...
2 days
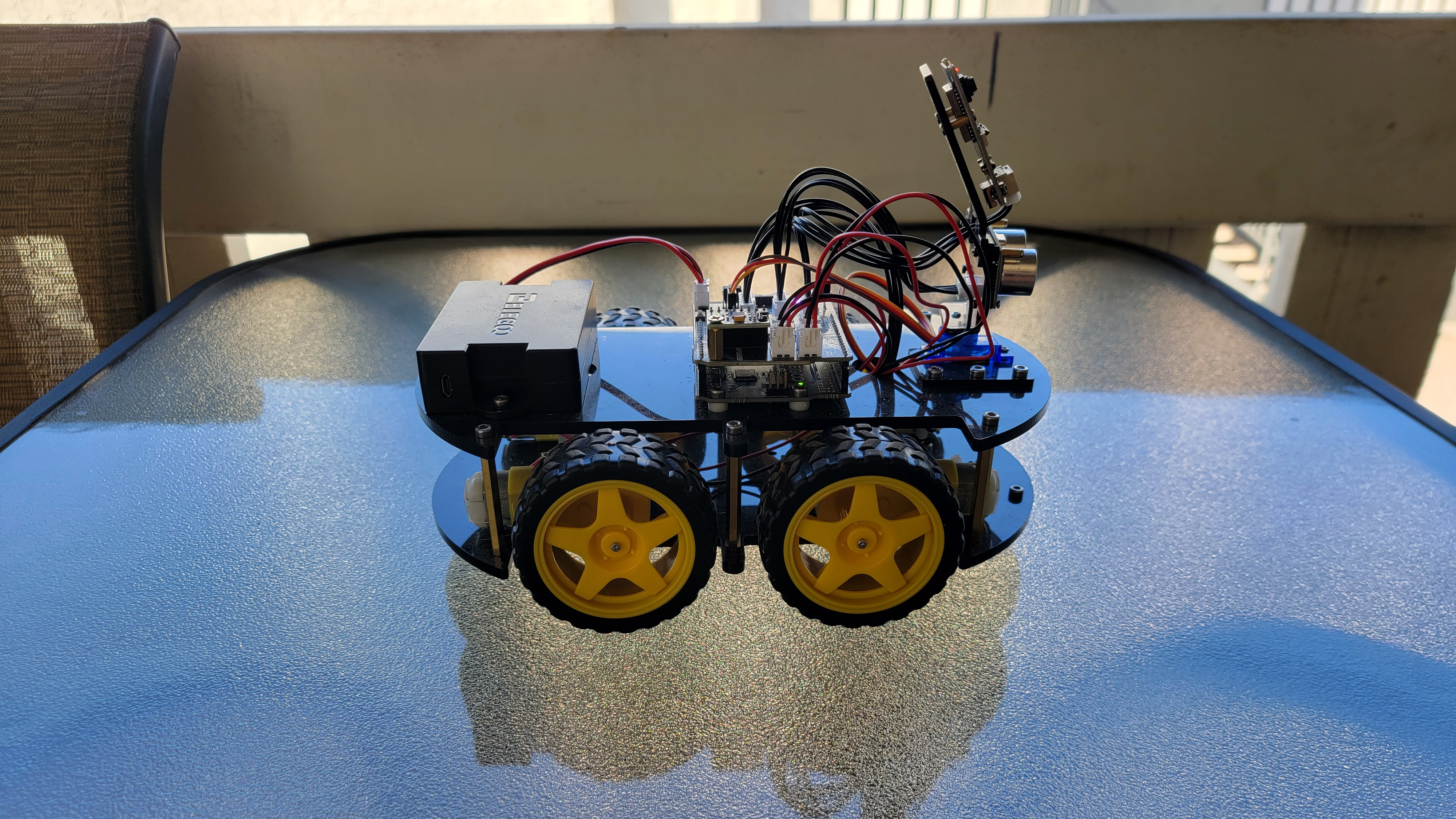
Arduino Uno R3 Smart Car
This robot came as a kit that needed to be assembled. It utilized an Arduino Uno, an ESP32 camera, ultrasonic sensor for obstacle avoidance,...